
Kostenlose Rücksendung
Art: NB009EAN: 8720618827135
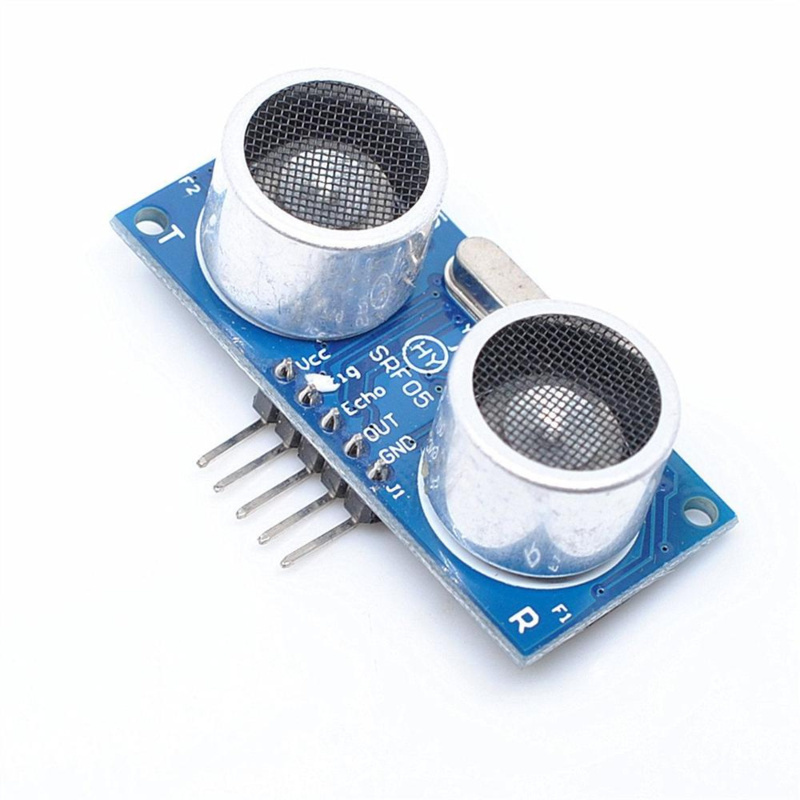
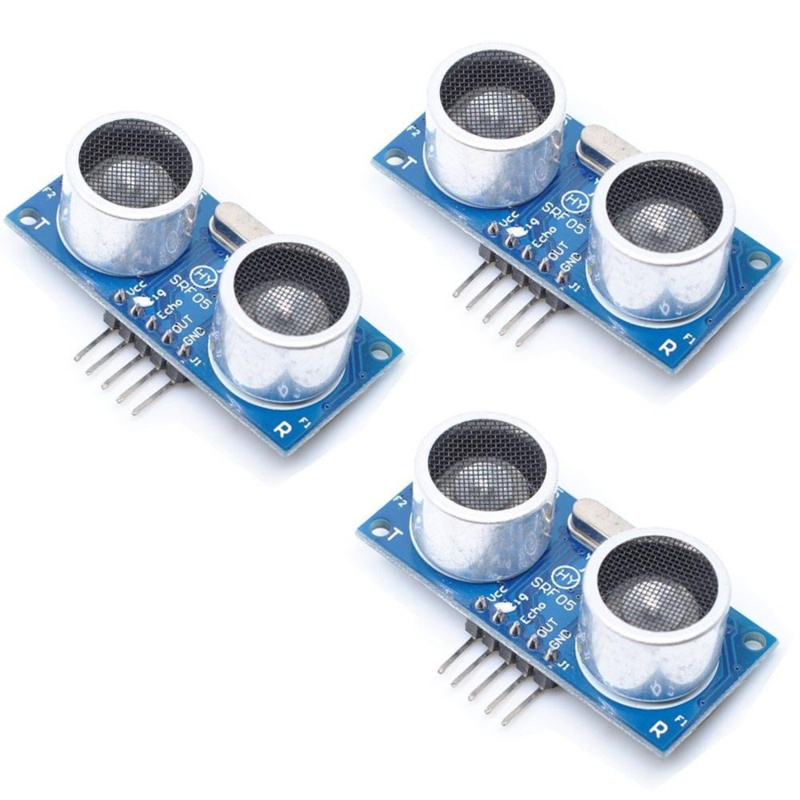
HY-SRF05 Ultraschall-Abstandssensormodul 5 Pins (OT3624)
Zeige alle:
Sensoren,Entfernungssensoren








Möchten Sie größere Mengen dieses Produkts bestellen oder benötigen Sie ein Angebot für Ihre Organisation? Fordern Sie ein Angebot an.
ANGEBOT ANFORDERNVielen Dank für Ihre Anfrage.
Sie erhalten das Angebot in wenigen Minuten per E-Mail.
Sie erhalten das Angebot in wenigen Minuten per E-Mail.
Kostenlose Rücksendung
An Werktagen vor 15:00 Uhr bestellt = am selben Tag versendet.
30 Tage Rückgaberecht
1 Jahr Garantie
Beschreibung
Das Ultraschall-Entfernungsmessermodul HY-SRF05 verwendet Ultraschallwellen, um Anwesenheit zu erkennen und den Abstand zu Objekten vor ihm zu messen.
HAUPTMERKMALE:
2 cm - 450 cm (15 Fuß) Erfassungsbereich
40-kHz-Betrieb
±15 Grad Sichtfeld
5-V-Betrieb
Der Erfassungs- und Messbereich reicht von 2 cm bis 450 cm mit einer angegebenen Genauigkeit von ± 2 mm. Der Ultraschall pulsiert mit 40 kHz und ist für das menschliche Ohr nicht hörbar. Der HY-SRF05 ist eine Version mit höherer Präzision als der HC-SR04, aber ansonsten in der Funktionalität vergleichbar.
Diese Module werden häufig in Roboterfahrzeugen zur Hinderniserkennung und -vermeidung eingesetzt. Da sie zur Erkennung Schallwellen verwenden, reagieren sie nicht empfindlich auf Lichtquellen oder optisch reflektierende Oberflächen, wie dies bei IR der Fall sein kann. Darüber hinaus ist es durch die Verwendung von Schall anstelle von Licht möglich, die Zeit zu messen, die der Schall benötigt, um zurückzukommen, und daher kann die Entfernung zum Objekt mit ziemlicher Genauigkeit berechnet werden, was sehr nützlich sein kann.
Die Module haben eine „Sicht“ von ca. ±15 Grad, weshalb sie manchmal auf einem Servomotor montiert sind, damit der Sensor auf seine Umgebung „schauen“ kann. Die Tatsache, dass die Sensoren einem Augenpaar ähneln, trägt ebenfalls zum Coolness-Faktor bei.
WIE FUNKTIONIERT DAS ULTRASCHALL-ENTFERNUNGSMESSERMODUL HY-SRF05
Das Das Modul ist normalerweise inaktiv.
Ein logischer HIGH-Impuls von 10 µSek oder länger wird an den TRIG-Pin des Moduls gesendet, normalerweise von einem Mikrocontroller. Dadurch startet das Modul einen Erkennungszyklus.
Das Modul sendet acht 40-kHz-Tonstöße aus und schaltet seinen ECHO-Pin-Ausgang auf HIGH.
Wenn das Signal von einem Objekt zurückreflektiert und erkannt wird Nach dem Modul wird der ECHO-Pin auf LOW zurückgesetzt.
Durch Messen, wie lange der ECHO-Pin auf HIGH gehalten wird, kann die Entfernung zum Objekt mithilfe der Grundformel berechnet werden (Zeit, in der ECHO auf HIGH gehalten wird * Geschwindigkeit). des Schalls / 2) Durch 2 dividieren liegt daran, dass sich der Schall in beide Richtungen ausbreiten muss (sowohl hin als auch zurück) und wir nur die Entfernung wissen wollen.
Wenn kein Echo zurückkommt (kein Objekt erkannt oder Wenn das Signal blockiert ist, senkt das Modul den ECHO-Pin nach einer festen Verzögerung trotzdem ab. Diese Verzögerung kann variieren, beträgt aber bei den von mir gemessenen Modulen etwa 200 mSek. Dies ist notwendig, um zu verhindern, dass das Modul festklebt, wenn kein Echo vorhanden ist.
Die Schallgeschwindigkeit variiert leicht mit der Lufttemperatur, sodass für maximale Genauigkeit die Lufttemperatur gemessen und zur Berechnung der aktuellen Geschwindigkeit verwendet werden kann Ton, ist aber für die grundlegende Kollisionserkennung nicht erforderlich.
Modulanschlüsse:
Auf der Baugruppe befindet sich ein 5-Pin-Header. Der GND-Pin ist mit der Systemmasse verbunden und der Vcc-Pin ist mit 5 V verbunden. Der TRIG-Pin ist ein Eingangspin, an den ein 10uSec-Impuls angelegt wird, um den Messzyklus zu starten. Der ECHO-Pin ist ein Ausgangspin, der für die Zeit, in der das Modul einen 40-kHz-Impuls sendet, bis zum Empfang des Echos auf HIGH gehalten wird. Der OUT-Pin wird nicht verwendet.
1 x 5-Header
VCC – Anschluss an 5 V.
TRIG – Trigger-Eingang – Anschluss an einen digitalen Ausgangspin der MCU. Ein Impuls von 10 µSek oder länger startet einen Messzyklus
ECHO – Echoausgang – Anschluss an einen digitalen Eingangspin der MCU. Dieser Pin wird während des Messzyklus auf High gehalten.
OFF – Nicht verwendet
GND – Mit Systemmasse verbinden. Diese Masse muss der MCU gemeinsam sein.
Bewertungen
0/10
Kein Bewertungen
Ihre Bewertung hinzufügenAuch interessant für Sie:








Kies je taal / Choose your language:
Durch die Nutzung unserer Webseite stimmen Sie dem Gebrauch von Cookies zur Verbesserung dieser Seite zu.
Diese Nachricht AusblendenFür weitere Informationen beachten Sie bitte unsere Datenschutzerklärung. »