
Kostenlose Rücksendung
Art: NA272EAN: 8720589817388
Motortreibermodul TB6612FNG für Arduino (OT2065-A44)
Zeige alle:
Elektromotoren,Motorsteuerung



Möchten Sie größere Mengen dieses Produkts bestellen oder benötigen Sie ein Angebot für Ihre Organisation? Fordern Sie ein Angebot an.
ANGEBOT ANFORDERNVielen Dank für Ihre Anfrage.
Sie erhalten das Angebot in wenigen Minuten per E-Mail.
Sie erhalten das Angebot in wenigen Minuten per E-Mail.
Kostenlose Rücksendung
30 Tage Rückgaberecht
1 Jahr Garantie
Beschreibung
Eigenschaften:
1. Standby-Steuerung zum Energiesparen.
2. Steuermodi CW/CCW/Kurzbremsung/Motorstopp.
3. Eingebauter thermischer Abschaltkreis und Unterspannungserkennungskreis.
Beschreibung:
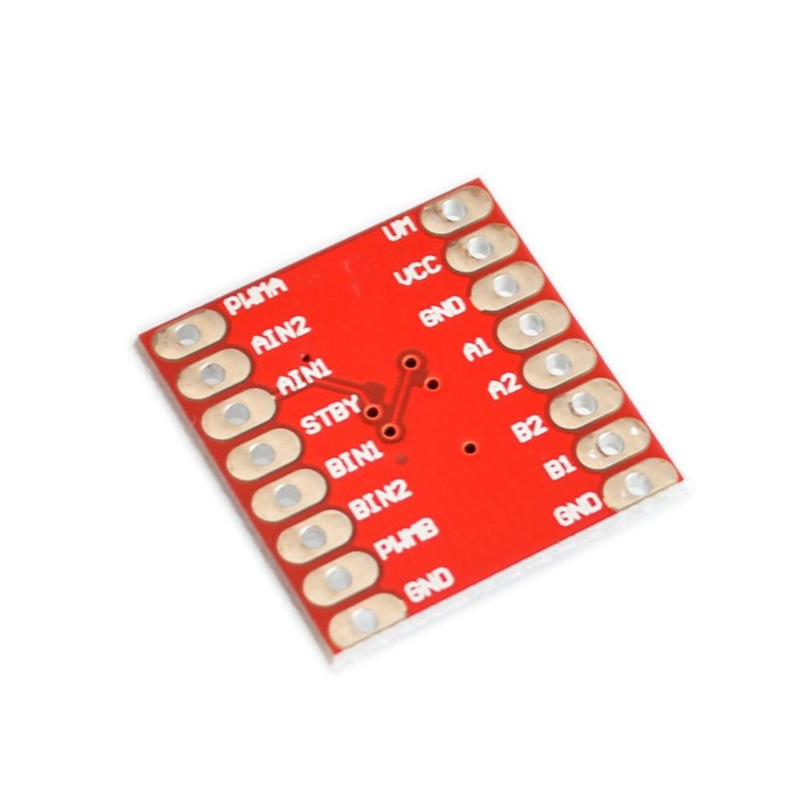
Der TB6612FNG-Motortreiber kann bis zu zwei Gleichstrommotoren mit einem konstanten Strom von 1,2 A (3,2 A Spitze) antreiben. Über zwei Eingangssignale (IN1 und IN2) kann der Motor in einem von vier Funktionsmodi gesteuert werden: Rechtslauf, Gegenuhrzeigersinn, Kurzbremsung und Stopp. Die beiden Motorausgänge (A und B) sind separat steuerbar, die Drehzahl jedes Motors wird über ein PWM-Eingangssignal mit einer Frequenz von bis zu 100 kHz gesteuert. Der STBY-Pin muss hochgezogen werden, um den Motor aus dem Standby-Modus zu holen.
Die logische Versorgungsspannung (VCC) kann im Bereich von 2,7–5,5 VDC liegen, während die Motorversorgung (VM) auf begrenzt ist eine maximale Spannung von 15 VDC. Der Ausgangsstrom beträgt bis zu 1,2 A pro Kanal (oder bis zu 3,2 A für einen kurzen Einzelimpuls).
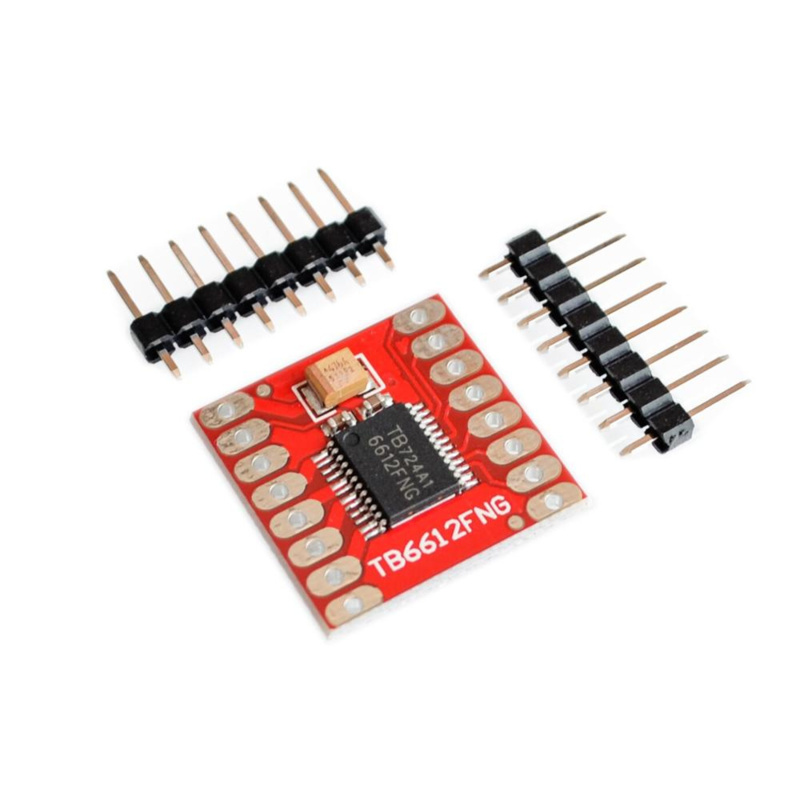
Die Platine wird wie abgebildet mit allen Komponenten geliefert, einschließlich der Stiftleisten.
Spezifikationen:
Versorgungsspannung: VM = 15 V max, VCC = 2,7–5,5 V
Ausgangsstrom: Iout = 1,2 A (Durchschnitt) / 3,2 A (Spitze)
Abmessungen
Länge: 2 cm
Breite: 2 cm
Höhe: 0,3 cm
Bewertungen
0/10
Kein Bewertungen
Ihre Bewertung hinzufügenAuch interessant für Sie:












Kies je taal / Choose your language: