
Art: NB009EAN: 8720618827135
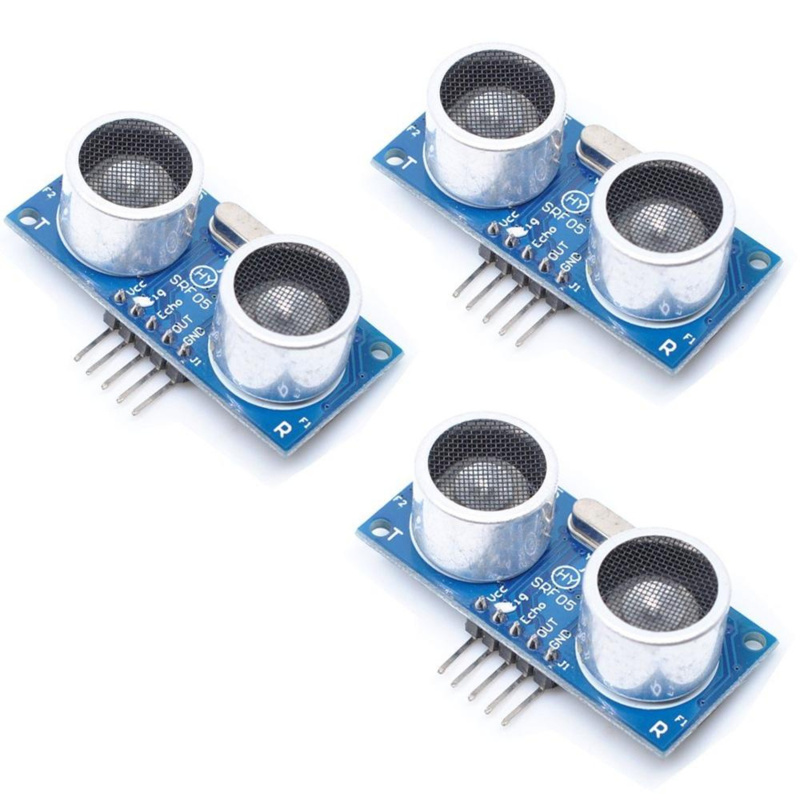
HY-SRF05 Module de capteur de distance à ultrasons 5 broches (OT3624)
Afficher tous:
Capteurs,Capteurs de distance









Vous souhaitez commander en grande quantité ou avez besoin d’un devis pour votre organisation ? Demandez un devis.
DEMANDER UN DEVISMerci pour votre demande.
Vous recevrez le devis dans votre boîte mail dans quelques minutes.
Vous recevrez le devis dans votre boîte mail dans quelques minutes.
Retours gratuits
Commandé les jours ouvrables avant 15h00 = expédié le jour même.
30 jours de délai de réflexion
1 an de garantie
Description
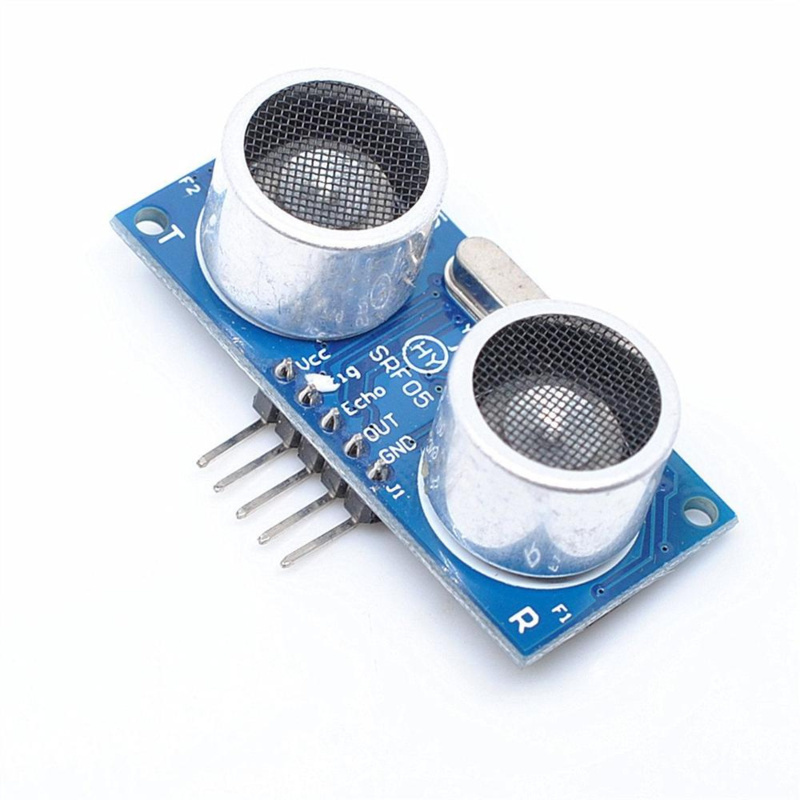
Le module de télémètre à ultrasons HY-SRF05 utilise des ondes sonores à ultrasons pour détecter sa présence et mesurer la distance aux objets devant lui.
CARACTÉRISTIQUES PRINCIPALES :
2 cm - Portée de détection de 450 cm (15 pieds)
Fonctionnement à 40 kHz
Champ de vision de ±15 degrés
Fonctionnement à 5 V
La plage de détection et de mesure est de 2 cm à 450 cm avec une précision déclarée de ± 2 mm. Le son ultrasonore pulse à 40 kHz et est inaudible pour l'oreille humaine. Le HY-SRF05 est une version plus précise que le HC-SR04, mais ses fonctionnalités sont par ailleurs similaires.
Ces modules sont couramment utilisés sur les véhicules robotiques pour la détection et l'évitement d'obstacles. Parce qu'ils utilisent des ondes sonores pour la détection, ils ne sont pas sensibles aux sources lumineuses ou aux surfaces optiquement réfléchissantes comme l'IR peut l'être. De plus, en utilisant le son au lieu de la lumière, il est possible de mesurer le temps qu'il faut pour que le son se répercute et donc la distance à l'objet peut être calculée avec une bonne précision, ce qui est assez pratique peut être.</ p>
Les modules ont une 'vue' d'environ ±15 degrés, ils sont donc parfois montés sur un servomoteur pour permettre au capteur de "regarder" son environnement. Le fait que les capteurs ressemblent à une paire d'yeux ajoute également au facteur cool.
COMMENT FONCTIONNE LE MODULE HY-SRF05 ULTRASONIC REMOTEFINDER
Le module est normalement inactif.
Une impulsion logique HIGH de 10 uSec ou plus est envoyée à la broche TRIG du module, généralement par un microcontrôleur. Cela amène le module à démarrer un cycle de détection.
Le module émet huit rafales de son de 40 KHz et définit sa sortie de broche ECHO sur HIGH.
Lorsque le signal est réfléchi par un objet et détecté par le module, la broche ECHO est réinitialisée sur LOW.
En mesurant combien de temps la broche ECHO est maintenue HIGH, la distance à la cible peut être calculée à l'aide de la formule de base (Time ECHO est maintenu HIGH * Speed du son / 2) Diviser par 2, c'est parce que le son doit voyager dans les deux sens (aller et retour) et nous voulons juste connaître la distance.
Si aucun écho ne revient (aucun objet détecté ou signal est bloqué), le module abaissera toujours la broche ECHO après un délai fixe. Ce délai peut varier, mais est d'environ 200 mSec sur les modules que j'ai mesurés. Ceci est nécessaire pour empêcher le module de se bloquer s'il n'y a pas d'écho.
La vitesse du son varie un peu avec la température de l'air, donc pour une précision maximale, la température de l'air peut être mesurée et utilisée pour calculer la vitesse actuelle du son, mais elle n'est pas nécessaire à des fins de détection de collision de base.< /p>
Connecteurs du module :
Il y a un connecteur à 5 broches sur l'assemblage. La broche GND est connectée à la masse du système et la broche Vcc est connectée au 5V. La broche TRIG est une broche d'entrée à laquelle une impulsion de 10uSec est appliquée pour démarrer le cycle de mesure. La broche ECHO est une broche de sortie qui est maintenue HAUTE pendant le temps entre le moment où le module envoie une impulsion de 40 KHz jusqu'à ce qu'il reçoive l'écho. La broche OUT n'est pas utilisée.
En-tête 1 x 5
VCC – Connectez-vous à 5V.
TRIG – Entrée de déclenchement – Connectez-vous à une broche de sortie numérique sur MCU. Une impulsion de 10 uSec ou plus démarre un cycle de mesure
ECHO - Sortie écho - Connectez-vous à une broche d'entrée numérique sur MCU. Cette broche est maintenue haute pendant le cycle de mesure.
OFF – Non utilisé
GND – Connectez-vous à la terre du système. Cette terre doit être partagée avec le MCU.
Évaluations
0/10
Aucune évaluation n'a été trouvée
Ajouter un avisAussi intéressant pour vous :






Précédemment consulté


Kies je taal / Choose your language: