
Schéma de connexion de servomoteur et code d'exemple pour Arduino
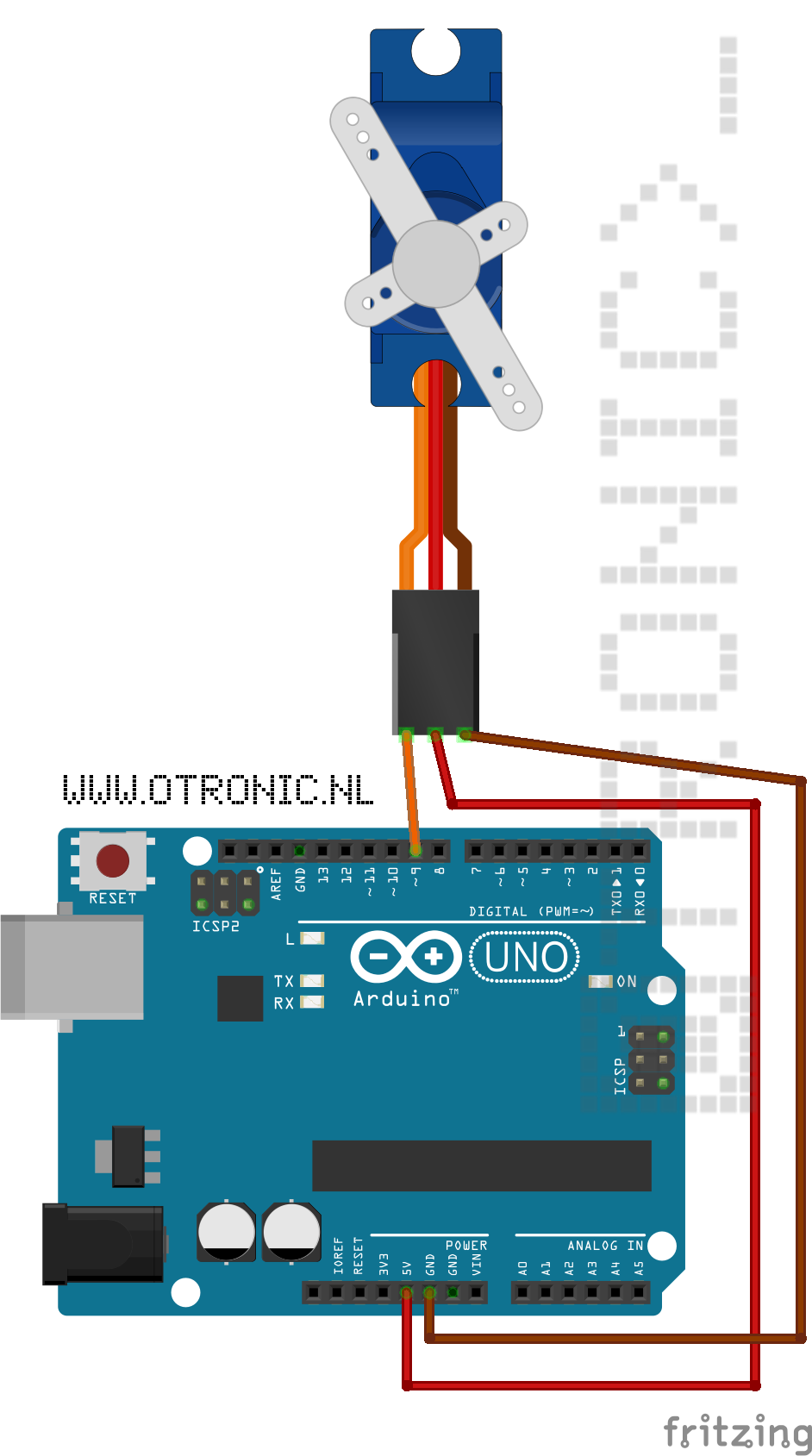
La plupart des servos ont trois fils - rouge, noir et marron (parfois blanc). Le fil rouge est généralement le fil d'alimentation +, le fil noir est le fil de mise à la terre - et le fil marron est le fil de signal.
- Connectez le fil d'alimentation du servo à la broche 5V de l'Arduino. Le fil de terre doit être connecté à la broche GND de l'Arduino.
- Connectez le fil de signal du servo à la broche numérique 9 de l'Arduino.
- Connectez l'Arduino à votre ordinateur pour télécharger le code.
- Programmez l'Arduino pour contrôler le servo. Cela peut être fait en utilisant la bibliothèque Servo d'Arduino. Voici un exemple de code que vous pouvez utiliser dans l'IDE Arduino
Schéma de connexion
Code d'exemple pour l'IDE Arduino
#include
Servo servoMotor; // Créez un objet servo
void setup() {
servoMotor.attach(9); // Indiquez la broche à laquelle le servo est connecté (ici : broche 9)
}
void loop() {
servoMotor.write(0); // Envoyez le servo à la position de 0 degré
delay(1000); // Attendez 1 seconde
servoMotor.write(90); // Envoyez le servo à la position de 90 degrés
delay(1000); // Attendez 1 seconde
servoMotor.write(180); // Envoyez le servo à la position de 180 degrés
delay(1000); // Attendez 1 seconde
}Explication du code
Le code commence par importer la bibliothèque Servo.h, qui permet de contrôler un servo avec l'Arduino.
Ensuite, un nouvel objet Servo est créé avec le nom "servoMotor".
Dans la fonction setup(), la broche de signal du servo est connectée à la broche 9 de l'Arduino à l'aide de la fonction attach().
Dans la fonction loop(), d'abord une impulsion est envoyée au servo avec la fonction write() pour le mettre en position médiane (90 degrés).
Ensuite, une pause d'une seconde est définie à l'aide de la fonction delay().
Ensuite, une nouvelle impulsion est envoyée au servo avec la fonction write() pour le faire tourner dans le sens contraire des aiguilles d'une montre (0 degré). Ici aussi, une pause d'une seconde est définie.
Le code répète ces deux étapes tant que l'Arduino est allumé et que la fonction loop() est exécutée.
En modifiant les valeurs dans la fonction write(), vous pouvez faire tourner le servo dans différentes positions.